
Le robot en détails
La vocation première du micro-robot Ozobot est de se déplacer en suivant une ligne tracée dont l’épaisseur idéale est de 5 mm. L’enseignant ou l’élève peut tracer cette ligne en utilisant un feutre ou un marqueur large ordinaire.
Le chemin peut également être tracé directement sur une tablette tactile.

L’intérêt pédagogique d’Ozobot réside dans la possibilité de le programmer. Cette programmation se fait par l’intermédiaire de codes de couleurs. Les codes de couleurs sont des séquences de couleurs. Ces séquences sont composées de deux, trois ou quatre segments (ou gros points) de couleur contigus, situées directement sur le chemin.
Ozobot possède des capteurs conçus pour lire les informations situées en dessous de lui environ 150 fois par seconde ; il peut ainsi détecter les zones rouges, vertes, bleues, noires et blanches et réagir en conséquence. Pour bien fonctionner, les « zones couleurs » doivent être situées sur un tronçon droit, environ 2 cm avant l’intersection. Les séquences de couleurs agissent donc comme des panneaux de signalisation.
En fonction du code couleur lu, le robot peut :
tourner à droite ou à gauche
accélérer ou ralentir
faire demi-tour
faire un tour complet sur lui-même
partir en arrière
faire une pause...
La programmation associée à Ozobot est ce qu’on appelle une programmation évènementielle, par laquelle on indique au robot que :
SI tel évènement se produit ALORS il devra adopter tel comportement.
On retrouve ce type de programmation avec Thymio, par exemple. En l’occurrence on peut, par exemple, indiquer à Ozobot :
SI tu rencontres la séquence bleu/rouge/vert ALORS tu tournes à droite à la prochaine intersection.
Les codes couleurs associés aux comportements sont appelés OZOCODES.
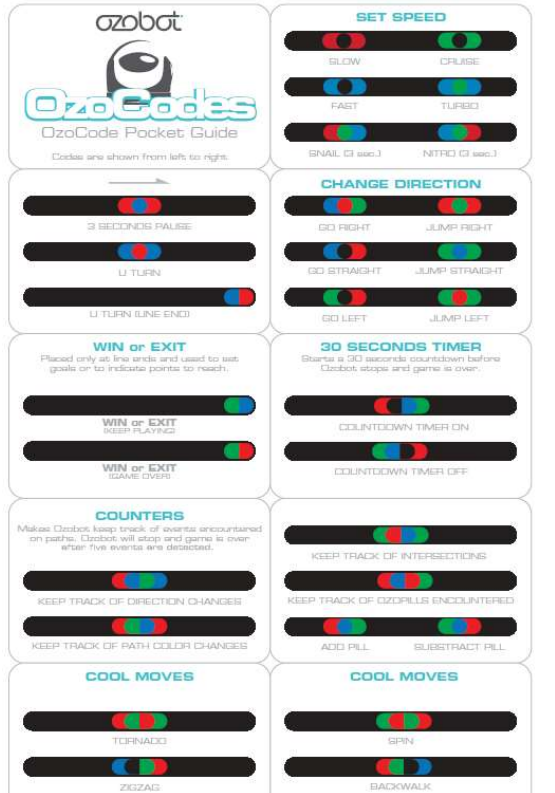
Ainsi, par exemple, lorsqu’Ozobot a lu la séquence bleu/rouge/vert, il tournera à droite à la prochaine intersection.
Pour des élèves aux fonctions cognitives plus développées, on pourra utiliser des blocs de programmation de type SCRATCH (OZOBLOCKLY) sur tablette tactile (http://ozoblockly.com/). Une fois le codage effectué sur la tablette, on dépose le robot sur l’écran dans la « zone de téléchargement » et le programme qu’on a fabriqué est converti en une séquence de flashs lumineux qui sont transmis à Ozobot afin qu’il puisse l’exécuter.
Voici deux exemples de programmation par bloc. On notera que les instructions sont (septembre 2015) en anglais :
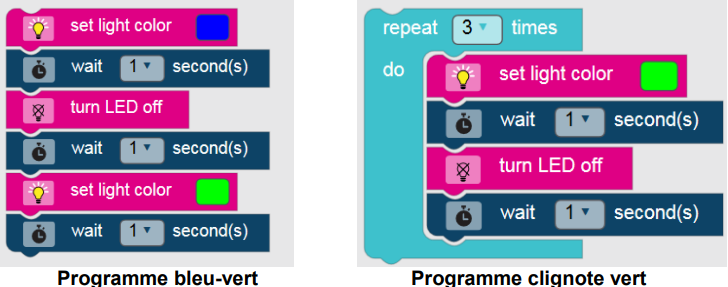
On remarque également qu’on est ici dans une programmation plus large que celle consistant, pour le robot, à suivre une ligne.
Programme bleu-vert :
Allumer Ozobot avec sa led bleue
Attendre 1 seconde
Éteindre la led
Attendre 1 seconde
Allumer Ozobot avec sa led verte
Attendre 1 seconde
Programme clignote vert
Répète 3 fois :
Allumer Ozobot avec sa led verte
Attendre 1 seconde
Éteindre la led
Attendre 1 seconde
Voici les blocs de programmation de base disponibles. Ils concernent :
Le mouvement du robot

Avance (ou recule) de n pas avec paramètre de vitesse
Pivote (droite ou gauche)
Avance en zigzag
Avance en « chaloupant »
Décris une spirale (droite ou gauche)
Décrit une grand/petit cercle, marche avant/arrière, vitesse

Différent effets de lumières permettent d’allumer une led de la couleur de son choix parmi 12 et de l’éteindre.

On trouve également des effets lumineux du type gyrophare / arc en ciel / feux de trafic / disco / arbre de Noël / feu d’artifice.
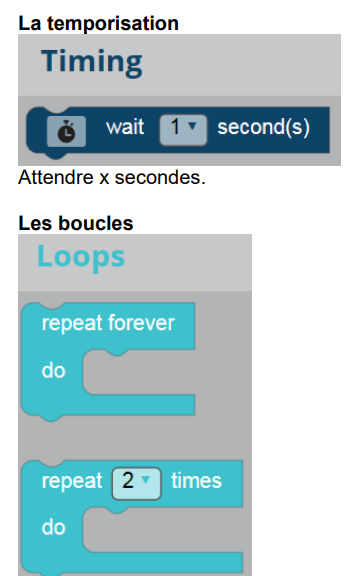
La programmation « débutant » possède la répétition (ou boucle) comme structure de contrôle. Celle-ci peut être indicée (répéter n fois) ou infinie (forever).
Les niveaux plus experts introduisent la structure de choix (SI... ALORS....SINON), les booléens (VRAI/FAUX), les symboles mathématiques, une variété de couleurs de led plus importante...
COMMENTAIRE PEDAGOGIQUE
Tout comme le Thymio, ce robot utilise le principe de la programmation
évènementielle. Il permet donc de travailler avec un objet cybernétique simple et peu onéreux. Il peut s’adapter à des élèves dont le développement intellectuel est encore balbutiant et/ou qui a besoin d’être structuré.
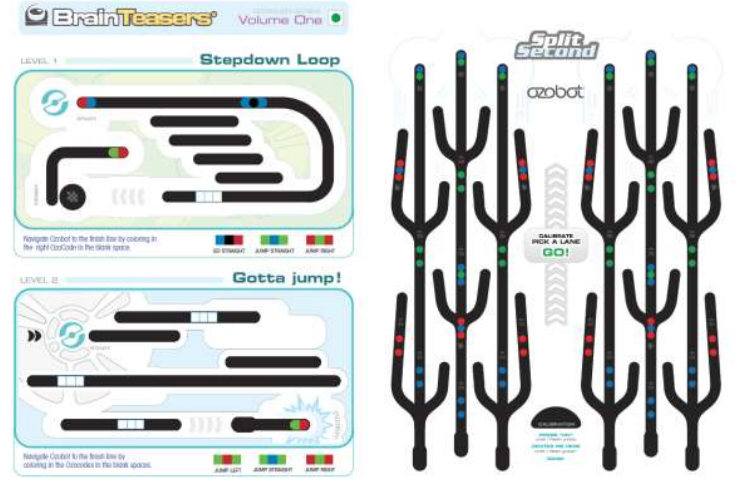
Sur le site d’Ozobot (http://ozobot.com/) on peut trouver des circuits prêts à être imprimés, ce qui facilite la tâche de l’enseignant.
L’utilisation d’un micro-robot de plancher comme Ozobot consitue un intérêt
indéniable pour les élèves présentant des troubles du langage. En effet, les
« comportements de base » d’Ozobot permettent d’entrer dans une véritable
démarche de résolution de problème et d’explicitation logique (SI... ALORS....SINON). On pourra facilement mettre en place des activités langagières liées à la description précise de ce que fait Ozobot lorsque qu’il rencontre telle ou telle séquence de couleur sur son chemin.
En menant des observations répétées, en émettant des conjectures, en les
confrontant à autrui, en communiquant ses observations et ses interprétations, l’élève sera dans une réelle démarche scientifique : réaliser des expériences, faire des observations, obtenir des résultats et des constats, argumenter, expliquer.
Pour les élèves présentant des TIFC, la simplicité de certains comportements du robot Ozobot permettra de les mettre en situation de réussite sur des questions simples : « que fait le robot ? », « pourquoi dis-tu ça ? », « explique ! » « essaie ! ».
On pourra ainsi, de manière prégnante, vérifier les hypothèses avancées. Le robot constituera un excellent auxiliaire à de véritables activités de résolution de problème.
Ozobot peut également être pertinent pour les élèves présentant des troubles liés à la motricité. En effet, ici, c’est le mobile qui se déplacera, en fonction des instructions qu’il lit sur son parcours. Il y a décentration de l’élève et anticipation des déplacements du robot.